KAIT Telescope Drive
Motor Controller
We use the the
Oregon Microsystems
model PC58 8 axis motor controller board, to control most of the
motors at the observatory. It has both stepper and dc servo
axes and 12 general purpose digital I/O lines.
Hour Angle
The telescope is driven using a direct friction drive with
a 48:1 reduction.
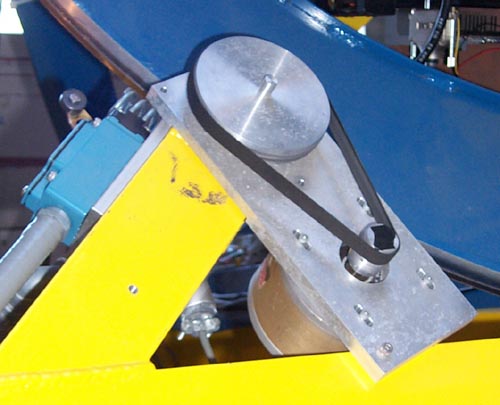
The hour angle drive uses a d.c. servo
fed back from
Renishaw tape encoder
system.
 This drive system
provides smooth tracking and fairly accurate small angle offsets
but tends to slip when moved over larger angles.
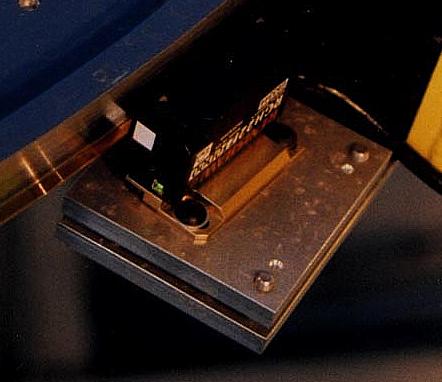
Hall effect sensors (Sony corp) are used to generate a very accurate index
pulse at the ha=dec=0 degree position.
This drive system
provides smooth tracking and fairly accurate small angle offsets
but tends to slip when moved over larger angles.
Hall effect sensors (Sony corp) are used to generate a very accurate index
pulse at the ha=dec=0 degree position.
Declination
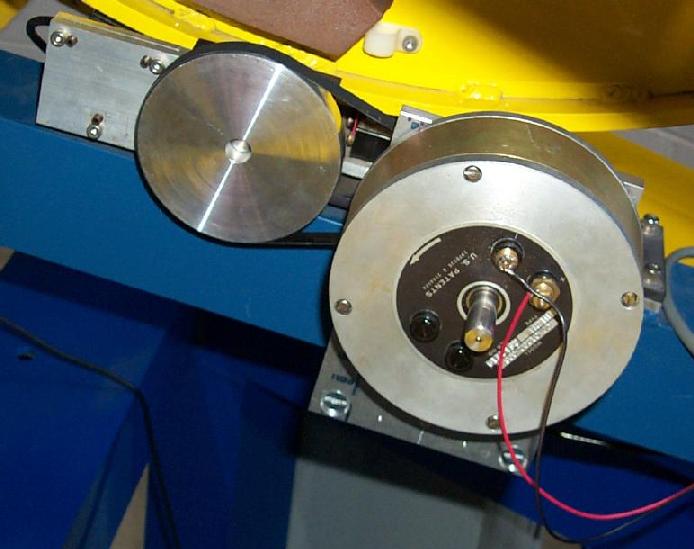
A d.c. servo similar to the HA axis is used to
control the declination axis thru a 36:1 direct
drive.
Computer control
All of the data acquisition at the observatory is done with
commercial cards placed in IBM-PC clone computers.
Each computer runs Linux and communicates with the master
computer running UNIX via an ethernet connection.
Pointing
The Renishaw tape encoders provide the hour angle and
declination readout.
The Sony Magnescale provide the index positions.
Time is provided from
Network Time Protocol.
The corrections to apparent position include:
- atmospheric refraction
- aberration
- nutation
Pointing corrections include
- ha and dec dial errors
- north and east polar error
- ha collimation error
- dec/ha non perpendicularity
- ha and dec scale errors
The mean uncorrected errors are on the order of 10 arc-seconds;
limited mainly by engineering time.
Dome
The dome azimuth is controlled by an
1/2 horse power 3 phase motor controlled by a
ABB electronic drive.
The position is encoded why a series of
168 stripes on the dome that are read by
a retro reflector; this gives
672 quadrature pulses per revolution.
The absolute position is denoted by a home marker at azimuth 132 degrees.
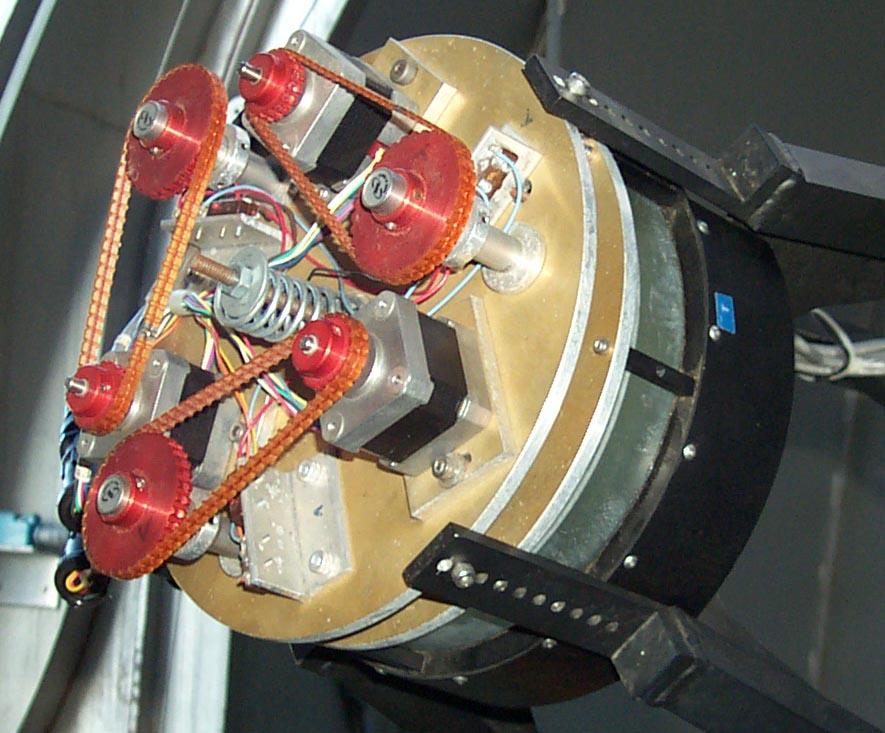
Secondary
The telescope secondary is mounted on three stepper driven micrometer
screws denoted T, U, and V.
The U actuator is to the West, the T to the North East
and the V to the South East.
Slit
The slit is opened by a 12 volt d.c. motor, powered
by a battery that rides atop the dome.
A solar cell charges the battery since we do not have
slip rings to send a.c. to the dome slit.
Two large coils of wire are placed around the dome, one
that rotates with the dome and the other on the base.
To open the dome a 100kHz tone is fed through the
lower coil.
A phase lock loop in the upper loop detects the tone
and causes the circuit to open the slit.
In the event of a power failure, the tone will go
away and the slit will close.
A interval timer is also used as a safety feature.
The computer must tell the dome to stay open every
3 minutes (or so) otherwise the timer will fail
and the slit will close.
Last Updated August 31, 2000 by
Email: rtreffers@astro.berkeley.edu